一、GNSS駕考/駕培系統背景
近年來,為提高駕照考試質量,確保公平、公正,國家公安部發布了第91號令、第111號令、第123號令以及其它相關技術規范,對駕考系統和標準進提出了改進要求。按照“簡單實用,準確可靠”的原則,很多駕考系統集成商基于GNSS產品開發了科目二、科目三等智能考試系統,定位精度可達1cm,在實現精準評判的同時,這套系統也幾乎將場地內的各種地埋傳感器完全取代,大大降低了后期的場地維護難度和費用,提高了考試或訓練場地的建設效率。另外,這套智能考試系統的推廣應用將實現機動車駕駛人考試工作由人工操作向計算機管理的轉變,提高了了考試工作的透明度,減少了人為因素,體現了公開、公正、公平的原則。
隨著GNSS駕考系統的推廣應用,駕校培訓系統也必須隨之升級,以適應駕考需要,事實上,相比較而言,駕培系統的應用更為廣泛,市場更大,因此,推出智能駕培系統具有廣泛的社會效益和經濟效益。
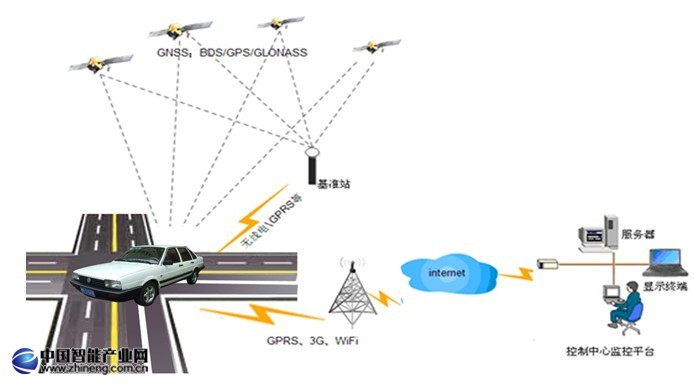
全球衛星定位系統可以實現實時高精度定位,其實時定位精度可達±1cm,實時數據輸出頻率最大可達20Hz,是目前大范圍高精度實時定位的理想選擇。GNSS定位系統由GNSS基準站、GNSS移動站、無線數傳電臺組成,系統具有如下幾個優點:
1、全天候作業:不受雨雪、大霧天氣及光照條件等因素的影響,可實現全天24小時作業;
2、車載移動站和基準站之間無須通視,大大增加了系統應用的靈活性;
3、車載GNSS設備和基準站使用無線數傳電臺通訊,覆蓋范圍可達半徑10公里以上,數據傳輸穩定可靠且保密性好;
4、定位精度及實時性高,定位精度在±1cm,RTK定位輸出頻率可達10Hz,原始數據可以達到20Hz。
二、方案介紹
整個駕考/駕培系統大體上包括兩大部分:硬件部分和軟件部分,硬件部分包括GNSS設備、攝像頭、無線網橋等各種車載傳感器和信號傳輸設備,負責收集各種數據并傳輸,軟件部分負責處理包括GNSS數據在內的各種傳感信息,并分析計算,最終報出評判結果。
GNSS設備可以選擇市場上已集成的RTK產品(整機),也可以采用GNSS板卡,兩種類型的區別在于:
RTK整機產品:
a)已經做好集成,可直接應用,縮短了開發周期
b)體積已經定型,無法任意修改,不方便進一步集成
c)成本相對較高
GNSS板卡:
a)需要自行設計底板進行集成,開發周期相對較長
b)板卡體積較小,便于與其他設備統一集成
c)成本較低
2.1 科目三GNSS應用方案介紹
科目三、科目二GNSS應用方案中,都包括基準站系統和車載移動站系統兩大部分,其中基準站系統是一樣的,差別在于車載移動站系統,對于科目三來說,一般采用單天線GNSS設備來實現精確定位,而對于科目二來說,一般采用雙天線GNSS設備同時實現精確定位和精確定向。
科目三GNSS應用系統可以評判的內容如下表:

2.1.1 GNSS基準站系統建設
基準站包括GNSS接收機、GNSS天線、無線數傳電臺、供電設備、避雷設備等。

GNSS差分基準站是整個定位系統的基準框架,長期連續跟蹤觀測衛星信號,通過數據無線數傳電臺實時傳輸播發基準站差分改正信息,并實時為各車載移動站提供高精度的載波相位差分數據及起算坐標。
由于差分信息的播發的連續性和可靠性直接關系到全場的所有車載GNSS設備的GNSS精度,它提供的差分改正數是場內所有車輛定位精度達到厘米級的基礎,在基準站位置選擇時應做多方面綜合考慮。參考站要求建立在地基穩定的地點,同時GNSS基準站場地應滿足以下要求:
a)基站的位置一般選擇高處、空曠的位置,距易產生多路徑效應的地物(如高大建筑、樹木、水體、海灘和易積水地帶等)的距離不小于200m
b)保證地平線15度以上沒有遮擋,建議建設在考試場地范圍內的最高處
c)距電磁干擾區(如微波站、無線電發射臺、高壓線穿越地帶等)的距離不小于200m
d)避開易產生振動的地帶
e)須保證供電的穩定性,對于電子設備來說,電源不穩定顯然會降低其使用壽命甚至可能造成損壞,建議采用UPS設備進行電源保護,防止電源突然中斷、電壓下陷和電壓浪涌
2.1.2 GNSS車載移動站系統
GNSS車載移動站由GNSS接收機、GNSS 天線、無線電接收天線組成。
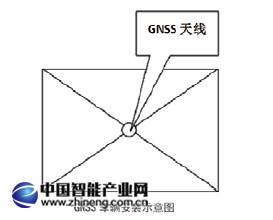
在實際應用時可以將車載移動站GNSS天線固定在車輛頂部,將GNSS接收機主機放在車輛內部,通過數據線和車載電腦連接,GNSS和電腦的通訊方式可以為RS232或RJ45 。

根據GNSS數據進行高精度評判可以通過兩種方式實現:
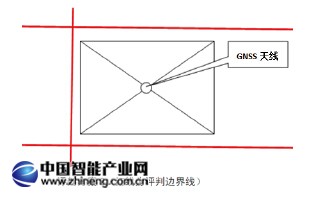
1)在考試路段電子地圖上設置GNSS天線所在位置的評判邊界線,如果車載GNSS移動站輸出的位置越界即判為不合格。
2)通過GNSS天線安裝的具體位置及距前后左右的距離,可以反算車輛邊緣(或輪胎)的精確位置,在考試路段電子地圖上設置車輛邊界或輪胎位置的評判邊界線,用于考試項目的評判,車輛邊緣位置越界即判為不合格。

2.1.3 司南GNSS車載移動站接收機輸出數據格式
車載GNSS移動站通過RS-232 或RJ45輸出的數據包括用于自動評判的三維位置、方向、速度信息等,可以很方便的利用這些信息進行評判,主要信息包括:
· 考試車輛當前位置的大地坐標(經度L、維度B、高度H);
· 考試車輛當前位置的的平面坐標(北向坐標x,東向坐標y,海拔高度h);
· GNSS定位狀態標記(判斷定位精度);
· 考試車輛運動速度(判斷車輛行駛速度);
· 考試車輛運動方位角(判斷車輛方向,方向值不變即為直線行駛)。
2.1.4 GNSS產品推薦
2.1.4.1 司南GNSS板卡
(一)K500板卡
K500 GNSS主板是司南導航公司完全自主研發的全球首款北斗衛星導航系統B1+ GPS L1+ GLonASS L1 三系統單頻OEM板卡。K500擁有優越的動態捕獲性能及高精度載波相位解算,填補國內外三系統單頻系統高動態、高精度單頻OEM板卡的市場空白。
K500的硬件尺寸、接口、數據指令與進口主板兼容。
K500可廣泛應用于GIS采集器、航空航天、機械控制、系統集成、勘探、精準農業、交通、海洋、港口、氣象、國防、科研院所、大專院校等行業的高精度差分定位與授時。
由于是單頻定位,K500板卡成本較低,但通過RTD或者RTK等差分方式,其精度也可以達到亞米級甚至厘米級,特別適合于駕考培訓系統。
特點:
· 采用北斗B1、GPS L1、GLonASS L1等三系統聯合定位或單系統定位,預留伽利略系統;
· 支持SBAS、RTD偽距差分,同時支持單頻RTK;
· 支持外接頻標,支持PPS輸出;
· 兼容進口板卡的物理尺寸、電氣接口以及指令報文,可完全替代進口板卡;
· 可直接輸出PJK平面坐標,易于各種系統集成及機械控制等;
· 支持定制化服務,可以滿足不同行業應用的特殊需求;
· 100M內存數據存儲,可自動記錄原始數據;
· 高可靠的載波跟蹤技術,大大提高了載波精度,為用戶提供高質量的原始觀測數據;
· 智能動態靈敏度定位技術,適應各種環境的變換,適應更加惡劣、更遠距離的定位環境;
· 全面的高精簡報文,易于數據傳輸及配套軟件的應用開發;
· 體積小、重量輕、功耗低;
· 獨一無二的性價比。
(二)K501板卡
K501 GNSS主板是司南導航完全自主研發的全球首款BD-2(北斗二代衛星導航系統)+GPS小尺寸主板,采用GPS+北斗雙系統四頻高動態解算引擎,定位可達厘米級定位精度。K501擁有優越的動態捕獲性能及高精度載波相位解算,填補了BD-2高動態、高精度應用市場的空白。
K501的硬件尺寸、接口、數據指令與進口主板兼容,與國外某主板(如OEM615),在大小、厚度、定位孔、接插件接口等等完全一致而且在功耗上要優于他們。
K501可廣泛應用于高精度駕考定位、測繪(RTK或手持RTK)、變形監測系統、機械控制、系統集成、勘探、精準農業、海洋、港口、氣象、國防、科研院所、大專院校等行業的高精度差分定位與授時。
特點:
· 支持BD-2 B1/B2,GPS L1/L2雙星四頻
· 優于進口板卡的雙星解算引擎,真正實現GPS+BD-2的雙星解算,適應更加惡劣、更遠距離的定位環境
· 支持GPS/BD-2單系統獨立定位和GPS+BD-2多系統聯合定位
· 兼容進口板卡的物理尺寸、電氣接口結合短報文指令,可完全替代進口板卡
· 快速RTK,適合于RTK或手持RTK
· 可直接輸出PJK平面坐標,易于各種系統集成及機械控制等,無線第三方進行投影轉換開發
· 支持短、中、長基線RTK解算
· 支持定制化服務,可以滿足不同行業應用的特殊需求
· 200M內存數據存儲,15秒采樣可存儲1個月數據
· 體積小、重量輕、功耗低
· 高數據更新率,RTK定位數據更新率1Hz\2Hz\5Hz\10Hz可調
· 獨一無二的性價比
2.1.4.2 司南M300C GNSS 接收機
司南M300C GNSS接收機采用自主研發的北斗二代+GPS雙星主板,濃縮國內外GNSS行業的先進技術,抗干擾能力強、定位速度快、精度高的特點,是國內高精度GNSS測量系統的典范。
M300C接收機主機功耗小于2.5W,由于功耗低產生熱量小,解決了密封性與散熱的矛盾,降低了接收機的損耗,保證接收機工作的穩定性,延長了接收機使用壽命。數據傳輸接口采用Lemo頭連接,保證了數據通訊的穩定性以及設備接駁的嚴密性。
M300C是工業級設計的專業接收機,堅固的外型結構和通用的技術性能適合進行長時間連續工作。M300C與AT300測量型天線設備配合使用,能夠最大限度地滿足駕考系統、機械控制、橋梁健康監測、大壩變形監測、地表沉降變形監測等行業系統集成的需要。
2.1.5 M300C主要特點:
· 采用北斗與GPS雙星四頻GNSS模塊,可單北斗或單GPS定位,也可聯合RTK定位,可以在惡劣環境、山區、相對遮擋較嚴重的地方快速定位
· 高度靈活的分體式接收機、天線設計,適用于各種變形監測、網絡參考站、駕考系統、機械控制等系統集成應用
· 內置2000伏光電隔離,對接收機有效進行過流過壓保護,預防雷擊
· 使用Autobase技術,開機即可快速實現參考站的配置
· 450MHz超高頻無線電臺適用基準站和流動站作業,確保現場工作的電臺信號覆蓋范圍以及數據安全性,通訊協議支持透明傳輸、TT450S
· 預留支持以太網、GSM/GPRS通訊
· 支持GPS信號和L2C現代化改造后的GPS信號
· 時間同步支持1PPS實時輸出
· 支持PJK平面坐標輸出,無需第三方軟件做投影轉換
· 支持自動差分,差分格式支持RTCM2.X、RTCM3.X以及CMR
· 兩個電源接口,兩個串口,滿足更多需求的使用
· 內部儲存為100M,可設置自動記錄原始數據
· 可遠程設置、下載、查看數據等等
2.2 科目二GNSS應用方案介紹
對于駕校考試系統的科目二,要求測試整個車輛的位置(前后左右移動情況),如果使用GNSS衛星定位系統至少需要兩臺設備,既要測出車的方位角度又要測出具體位置。
2.2.1 RTK成品推薦——M600姿態定位接收機
司南導航專為駕校系統研發設計出M600 GNSS姿態定位接收機,它采用中國的北斗二代衛星定位系統和美國GPS雙星四頻GNSS板卡,可以實現在樹下、遮擋較嚴重和高動態情況下能實現快速高精度定位和測向。通過M600 GNSS姿態定位接收機,可以準確無誤的判斷出車輛整體運動情況,誤差在厘米級定位精度。
主要特點
· 采用北斗與GPS雙核雙星四頻GNSS模塊,可單北斗或單GPS定位,也可聯合RTK定位
· 單套設備可實現高精度RTK定位坐標、方位角和俯仰角或橫滾角測量
· 支持PJK平面坐標輸出,無需第三方軟件做投影轉換
· 高動態數據輸出,數據更新率支持1Hz、2Hz、5Hz、10Hz
· 可根據客戶需求自定義數據輸出格式
· 450-470MHz超高頻無線電臺適用基準站和流動站作業,確保現場工作的電臺信號覆蓋范圍以及數據安全性,通訊協議支持透明傳輸、TT450S
· 內置2000伏光電隔離,對接收機有效進行過流過壓保護,預防雷擊
· 內置二極管電源保護功能,可防電源正負極接反
· 預留支持以太網、GSM/GPRS通訊
· 時間同步支持1PPS實時輸出
· 支持自動差分,差分格式支持RTCM2.X、RTCM3.X以及CMR
· 兩個電源接口,兩個串口,滿足更多需求的使用
· 內部儲存為100M,可設置自動記錄原始數據
· 高度靈活的分體式接收機、天線設計,可以應用于各種姿態測量系統
· 姿態測量功能精度優越、性能穩定、功能全面、易于操作,能提供靜態或動態平臺精確的實時航向、俯仰和橫滾姿態角,可以運用在多種運動載體上,如船舶、裝卸車輛、港口機械、飛機、雷達等,是海上、空中和地面等姿態測定應用最理想的選擇
2.2.2 工作原理
M600 GNSS姿態定位接收機內置兩塊GNSS板卡,其中一塊根據基準站發過來的差分數據進行RTK定位并輸出定位坐標,此板卡同時把原始數據發給另一塊板卡,另一板卡根據兩個板卡的原始數據解算出兩個天線位置的方位角和俯仰角或者橫滾角,從而輸出角度信息。
測姿的原理也是通過差分來實現,就是用兩臺接收機安置在基線的兩端并同步觀測相同的衛星,以確定基線兩端在地球坐標系中的相對位置或基線向量。它之所以能提高精度,就在于兩者的相關性,即通過差分技術來抵消公共誤差部分。
差分GNSS的原理如下圖原理所示。在已知位置上設置一個參考站,其由一個 GNSS差分接收機和一個差分發射機組成。參考接收機接收衛星信號,監測 GNSS系統的誤差,并按規定的時間間隔把修正信息發給另一個接收機,另一個接收機用修正信號校正自己的測量或位置解。

這是參考接收機是固定的情況,而實際應用時更多是都在移動,在這種情況下,參考接收機的位置也是未知的,參考接收機發送給用戶的不是差分改正數,而應是全部的偽距或相位,用戶接收機得到的也不是改正后的精度更高位置,而是精度較高的相對位置角度。
兩個GPS 天線組成一條基線可以確定載體的兩個姿態角,兩天線沿載體主軸方向配置,此時可以確定載體的偏航角和俯仰角。一般的,兩 GPS 天線在安裝好后,相對位置不發生變化,所以天線在載體坐標系中的坐標位置是確定的。

通過求解載波相位整周模糊度,兩天線在地心地固坐標系中的相對位置可以精確的求得,根據地心地固坐標系到當地水平坐標系的轉換關系,即可將基線矢量轉換到當地水平坐標系下,那么基線的兩維姿態角就可以確定了。

- 從AI Agent到智能化未來,神州數碼構建企業專屬AI能力
- 《超凡奶粉在中國》:一起見證中國母嬰營養發展史
- 加速行業“新智”生產力,至強W新品為專業AI應用帶來多核高能
- 小度聯合新華網客戶端,舉辦“AI技術對中小學教育的深度賦能”主題活動
- 攜手天士力,神州數碼AI賦能醫藥行業數字化轉型
- 共繪數字經濟未來,神州數碼登陸全球數字經濟大會
- 神州數碼亮相2024世界人工智能大會,以生成式AI和智能算力共繪智能未來
- 超圖攜手鯤鵬、昇騰共筑地理空間AI技術底座,共建原生開發繁榮生態
- Moka Ascend 2024|勢在·人為,技術創新,激發企業管理內在效能
- 東方通出席2023(第四屆)數字化轉型推動高質量發展大會